机械臂引导点胶
项目需求
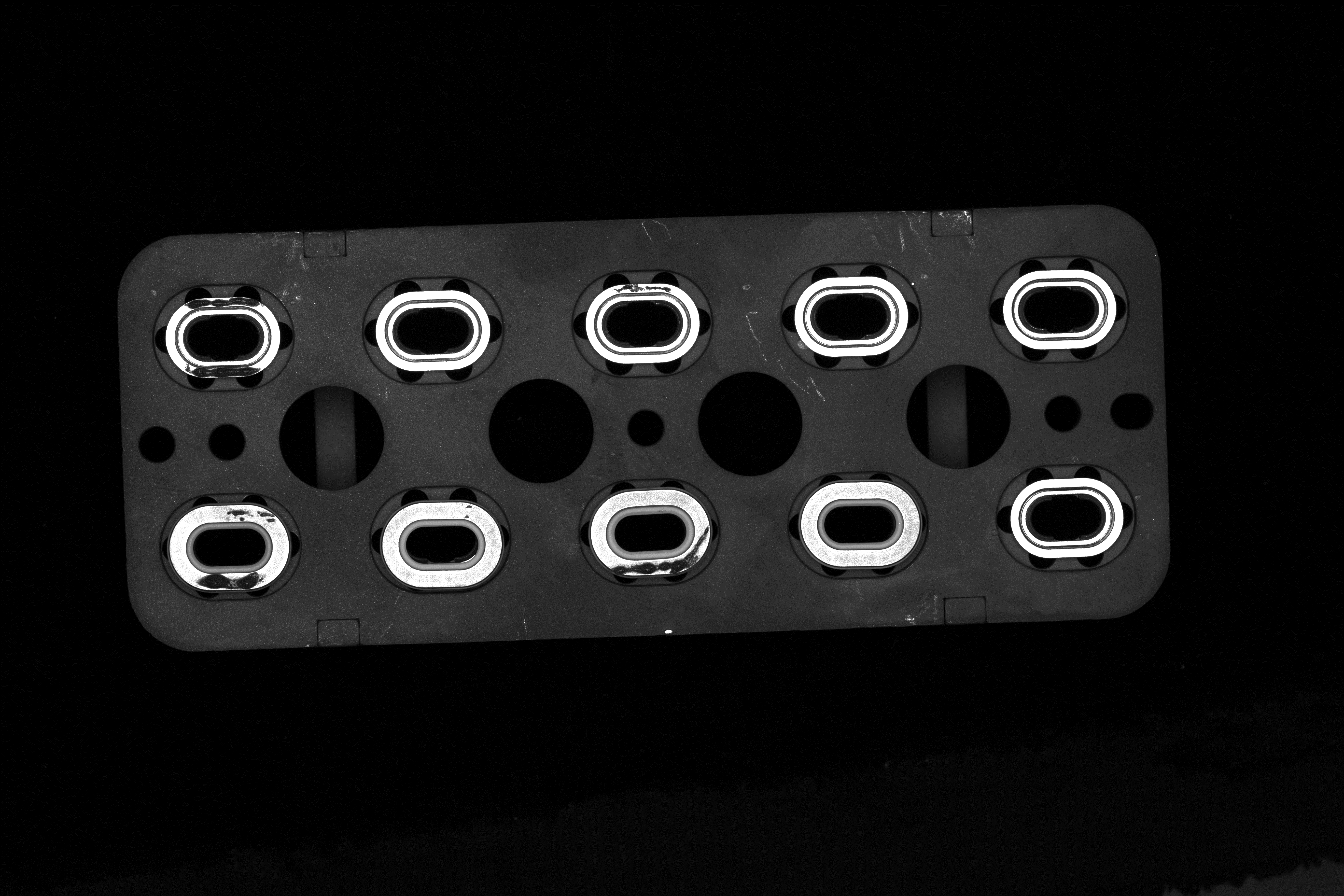
产品为小型触摸屏,产品上有2个Mark点,通过CCD拍照,计算点胶运动轨迹,然后把轨迹坐标点集发送给PLC,机械臂执行引导点胶
视觉调试,设备验收

核心技术
机械臂相机引导点胶
脚本点胶轨迹算法
项目难点及解决手段
难点:产品的放置平台没有R轴,产品放置在平台上有角度,需要根据2个Mark点计算旋转后的点胶轨迹
解决手段:通过CCD分别拍2个Mark点,计算2个Mark连线角度,然后使用脚本编写点胶轨迹的算法
项目成果与价值
软硬件配套出售(VisionMaster + VC)
前后实施不到10天,一台设备八个工位,使用VM快速搭建方案流程
使用脚本编辑实现
定位精确,重复精度0.06mm内,VM操作方便,灵活度高

 咨询热线:18551586946
咨询热线:18551586946
 邮编:215000
邮编:215000
 传真:18551586946
传真:18551586946
 地址:苏州工业园区唯新路91号中旭鑫科技园1号楼411室
地址:苏州工业园区唯新路91号中旭鑫科技园1号楼411室
 奥维尔官方微信
奥维尔官方微信
 当前位置:
当前位置: