方案介绍
纸杯缺陷检测方案通过视觉软件分区检测的方法,可以有效检出杯体不同位置的缺陷,并对问题纸杯进行自动剔除,能够应用在不同形式的纸杯机中,确保高效、安全生产。
与输送线式纸杯机(右).png")
转盘式纸杯机(左)与输送线式纸杯机(右)
方案组成
硬件组成
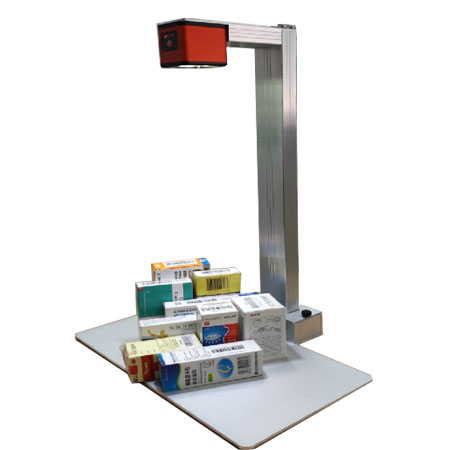
方案硬件由海康机器人200万或500万面阵相机、12mm镜头组成,通过红色或白色穹顶光源完成纸杯内壁、杯沿脏污缺陷和爆口缺陷检测,能够覆盖宽130mm、高100mm的区域,视野范围广泛。
方案支持VC3000视觉控制器,实现“1拖2”工位检测的功能。如切换不同规格的纸杯,只需调整架设距离和穹顶光源大小,无需更换其他硬件,整体调谐更加便捷。

方案架设示意图
软件组成
方案软件由海康机器人VisonMaster算法平台、定制框架软件组成,包含生产数据统计。
对全杯身5个区域(杯沿,杯身上,杯身下,杯底接缝,杯底)的检测中,支持用户自定义开启或关闭任一检测项;同时还支持定制化框架软件界面、自由定义ROI检测区域和缺陷参数,用户操作更加柔性和定制化,可以依据特定需求定制操作体验。

方案优势
• 检测环境:支持有杯托和无杯托环境自由切换
• 杯类型:兼容牛皮纸和传统白色纸杯缺陷检测
• 纸杯尺寸:在视野范围内且景深满足的情况下,可自由切换纸杯口径大小
• 方案效率:针对不同像素相机进行耗时优化,检出效率可达300个/分钟
• 检测精度:为3*3个像素,即0.15*0.15mm的缺陷面积
• 检测耗时:方案检测整体耗时<100ms (触发拍照+算法处理+结果反馈)

检测结果展示
左下图为含有杯托的纸杯检测效果图,右图为杯底检测效果图,通过深度学习算法,颜色较浅、难以检测的脏污也可以有效检测,补足传统检测方式的短板。
针对杯内缺陷进行直观渲染,显示缺陷面积和灰度阈值,可根据终端用户的需求进行自由调控。

应用案例
在某纸杯生产厂缺陷检测项目中,现场使用“1拖2”方案实现杯内壁和杯底的缺陷检测,实时显示每个纸杯口部、纸杯底部缺陷,操作人员一目了然。检测结果由IO信号输出,有效进行分类剔除,大幅提升生产效率。

相关产品

 咨询热线:18551586946
咨询热线:18551586946
 邮编:215000
邮编:215000
 传真:18551586946
传真:18551586946
 地址:苏州工业园区金陵东路128号恒创科技园一期3幢4楼402室
地址:苏州工业园区金陵东路128号恒创科技园一期3幢4楼402室
 奥维尔官方微信
奥维尔官方微信
 当前位置:
当前位置: